
Informations clés#
- Type de projet : Bras robotique avec IA
- Objectif principal : Apprentissage de la robotique et de l’intelligence artificielle
- Principaux composants : 12 servo-moteurs Feetech STS3215, 2 contrôleurs de servo-moteurs Waveshare
- Système d’exploitation, langage et framework : Linux, Python, LeRobot (PyTorch)
- État : en cours
Description#
Le projet LeRobot (SO-101) de Hugging Face vise à démocratiser la robotique en fournissant des modèles pré-entraînés, des jeux de données et des outils open source basés sur PyTorch. L’objectif est de réduire les barrières d’entrée et de permettre à chacun de contribuer et de bénéficier des avancées en apprentissage par imitation et en apprentissage par renforcement.
Source : https://huggingface.co/docs/lerobot/index
Un peu d’investissment monétaire est toutefois requis pour ce projet, soit un total d’environ(~) 360 $ CAD :
- 12 servo-moteurs (~240 $ CAD)
- 2 contrôleurs de servo-moteur (~30 $ CAD)
- 2 adaptateurs d’alimentation 5 V (~30 $ CAD)
- 2 câbles USB-C (~20 $ CAD)
- 1 kit de 4 supports (~20 $ CAD)
- Bobine de 1 Kg de PLA pour l’impression des pièces (~20 $ CAD)
Détails composants#
- Voir la liste des composantes sur le site officiel
- SeeedStudio vend un kit disponible sur demande chez Robotshop ou directement depuis le site de cette entreprise
- Imprimante 3D pour les pièces
- J’ai utilisé du simple PLA Eryone
- Pas d’imprimante 3D ? SeeedStudio vend les pièces déjà imprimées pour les deux bras. Ce kit est disponible sur demande chez Robotshop ou directement depuis le site de cette entreprise
Chronologie#
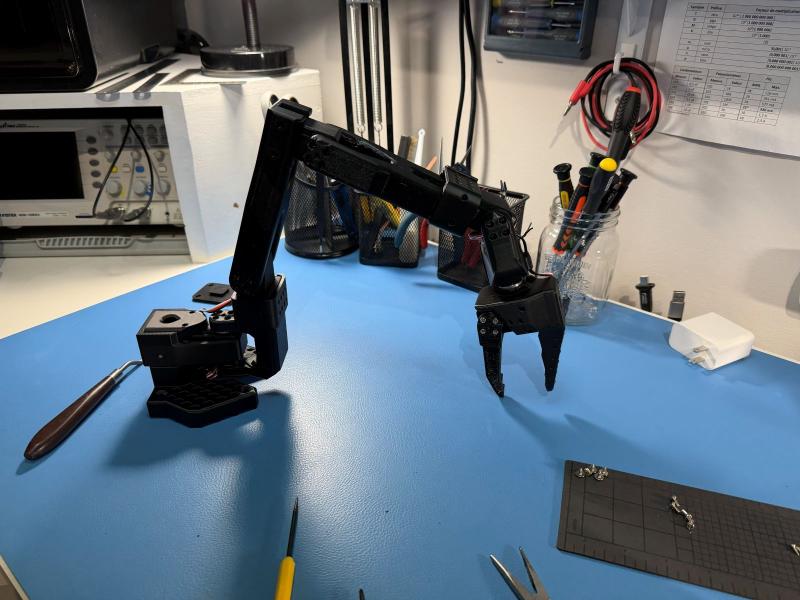
2025-12-23 - Bras follower presque terminé#
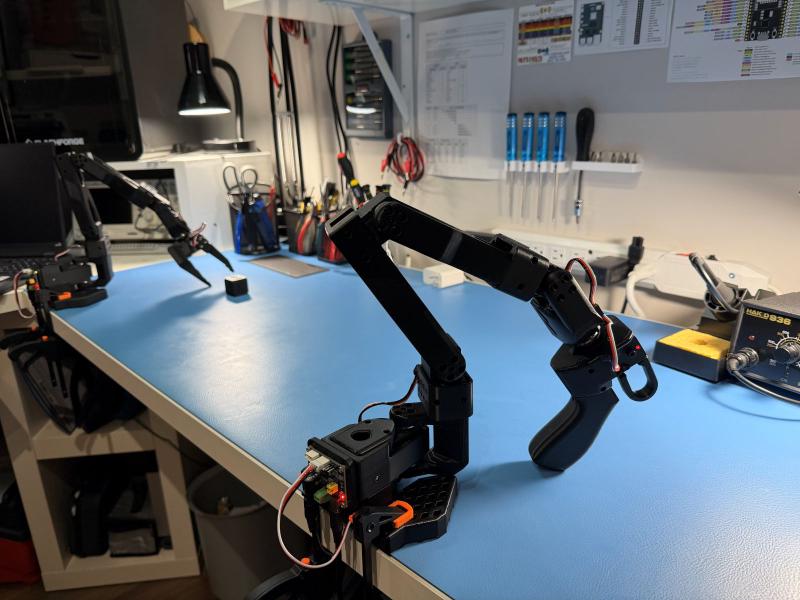
2026-01-02 - Bras follower finalisé et testé#

2026-01-18 - Bras leader finalisé et testé#
2026-01-18 - Premier essais avec le bras follower#
Premier essais de mouvements du bras follower à partir d’un enregistrement fait avec le bras leader.Un premier programme en Python enregistre un fichier CSV avec des mouvements que j’ai effectués manuellement pendant 10 secondes sur le bras leader. Un second programme Python lit le fichier CSV et reproduit ce mouvement sur le bras follower. C’est ce que représente cette vidéo. Encore aucune utilisation d’intelligence artificielle.
Le programme Python qui reproduit le mouvement est très basique et ne fait aucune compensation de latence ni de compensation d’échelle. Cela signifie que le follower ne reproduira pas exactement à l’identique le mouvement du leader.
Les prérequis pour faire rouler ces deux petits programme sont les suivants :
- Système d’exploitation Linux Ubuntu 22.04. Oui, ce n’est pas la plus récente version, mais celle qui est sans risque de problèmes avec LeRobot. Je n’ai pas encore testé avec la plus récente version.
- Visual Studio Code pour Linux avec extension Python
- LeRobot (logiciel) : https://huggingface.co/docs/lerobot/installation
- LeRobot (matériel) : https://huggingface.co/docs/lerobot/so101
2026-01-21 - Caméra fixée au bras follower#
