Informations clés#
- Type de projet : Robot mobile expérimental
- Objectif principal : Apprentissage de l’électronique et de ROS 2
- Principaux composants : Raspberry Pi 5, ESP32, kit Devastator de DFRobot
- Système d’exploitation, langage et framework : Linux, Python, ROS 2
- État : en cours
Description#
Robot expérimental conçu autour de ROS 2 (Jazzy), le Raspberry Pi 5, l’ESP32 et le langage Python. Beaucoup d’apprentissage à avancer en parallèle. Robot initialement bâti à partir du kit Devastator de DFRobot, maintenant, je n’utilise que les chenilles de cette plateforme. Les moteurs ont été remplacés par une version avec encodeur en quadrature. La voix du robot, en français, fonctionne grâce à Piper via le Raspberry Pi 5 et un petit module amplificateur mono classe D, 3W avec protocole I2S (MAX98357)
Principaux composants#
- Chenilles du kit Devastator de DFRobot
- Raspeberry Pi 5
- ESP32
- 2 Moteurs DC 6V DFRobot avec encodeur en quadrature (FIT0521)
- Module DAC amplificateur classe D TENSTAR MAX98357 I2S 3W
- Haut parleur Visaton BF37 5W, 8 Ohms
Chronologie#
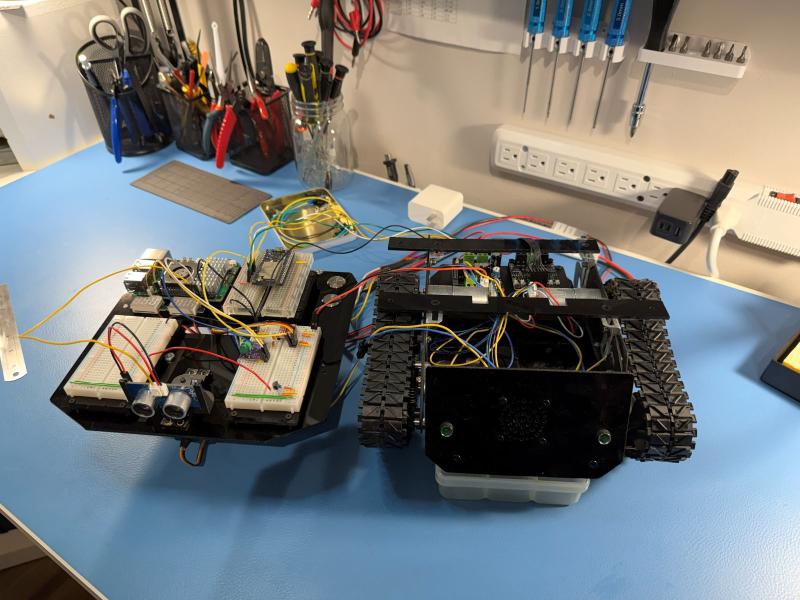
2025-12-12 - Peu avant une déconstruction partielle#
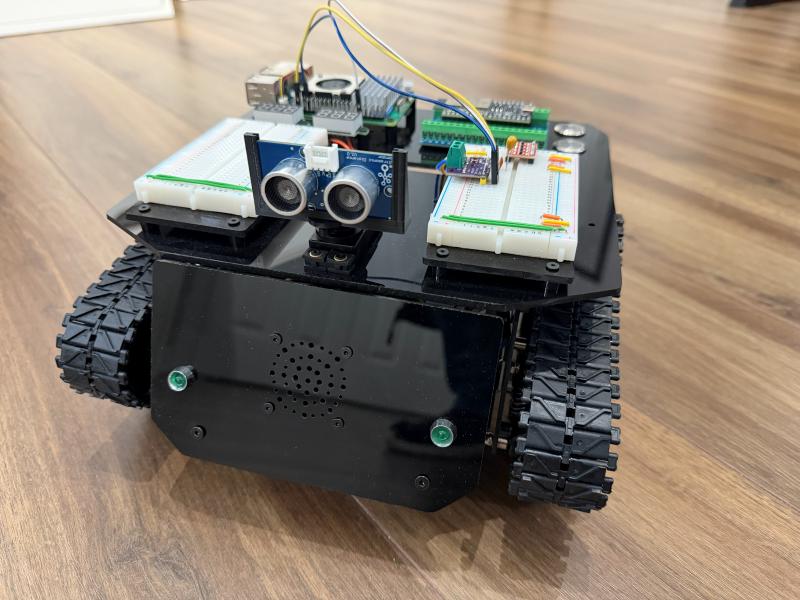
2025-12-22 - Après la déconstruction partielle#
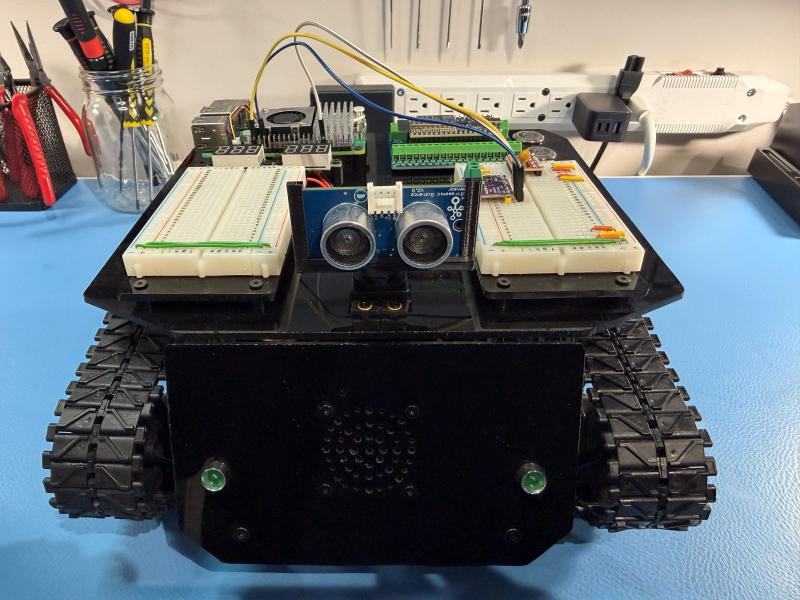
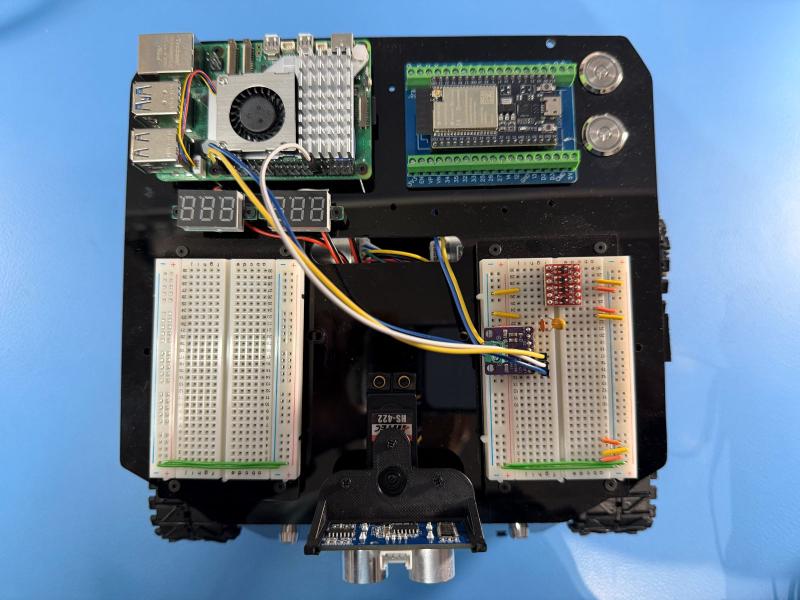
2025-12-22 - Vue du dessus#
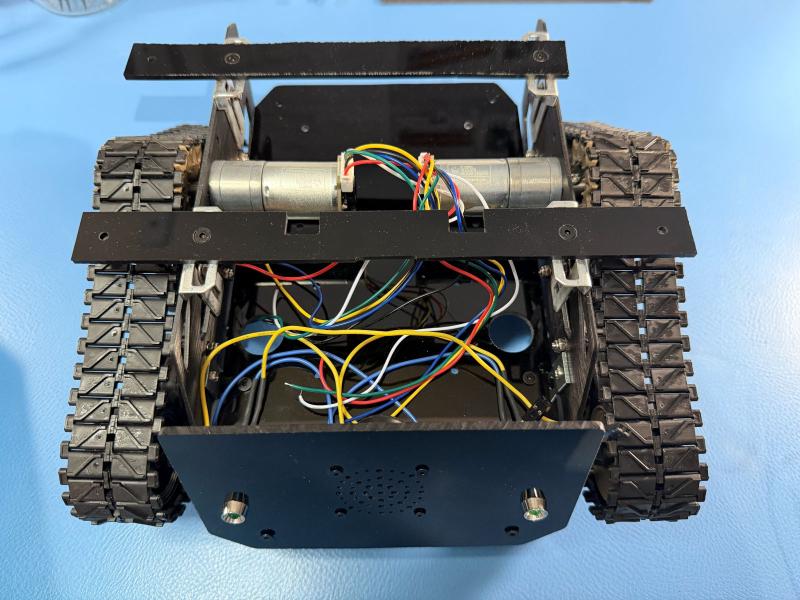
2025-12-22 - Capot ouvert#